Digiratory
Лаборатория автоматизации и цифровой обработки сигналов
Построение фазовых портретов на языке Python
Фазовая траектория — след от движения изображающей точки. Фазовый портрет — это полная совокупность различных фазовых траекторий. Он хорошо иллюстрирует поведение системы и основные ее свойства, такие как точки равновесия.
С помощью фазовых портретов можно синтезировать регуляторы (Метод фазовой плоскости) или проводить анализ положений устойчивости и характера движений системы.
Рассмотрим построение фазовых портретов нелинейных динамических систем, представленных в форме обыкновенных дифференциальных уравнений
В качестве примера воспользуемся моделью маятника с вязким трением:
Где \(\omega \) — скорость, \(\theta \) — угол отклонения, \(b \) — коэффициент вязкого трения, \(с \) — коэффициент, учитывающий массу, длину и силу тяжести.
Для работы будем использовать библиотеки numpy, scipy и matplotlib для языка Python.
Блок импорта выглядит следующим образом:
import numpy as np from scipy.integrate import odeint import matplotlib.pyplot as plt
Шаг 1. Реализация ОДУ в Python
Определим функцию, отвечающую за расчет ОДУ. Например, следующего вида:
def ode(y, t, b, c): theta, omega = y dydt = [omega, -b*omega - c*np.sin(theta)] return dydt
Аргументами функции являются:
- y — вектор переменных состояния
- t — время
- b, c — параметры ДУ (может быть любое количество)
Функция возвращает вектор производных.
Шаг 2. Численное решение ОДУ
Далее необходимо реализовать функцию для получения решения ОДУ с заданными начальными условиями:
def calcODE(args, y0, dy0, ts = 10, nt = 101): y0 = [y0, dy0] t = np.linspace(0, ts, nt) sol = odeint(ode, y0, t, args) return sol
Аргументами функции являются:
- args — Параметры ОДУ (см. шаг 1)
- y0— Начальные условия для первой переменной состояния
- dy0 — Начальные условия для второй переменной состояния (или в нашем случае ее производной)
- ts — длительность решения
- nt — Количество шагов в решении (= время интегрирования * шаг времени)
В 3-й строке формируется вектор временных отсчетов. В 4-й строке вызывается функция решения ОДУ.
Шаг 3. Генерация и вывод фазового портрета
Для построения фазового портрета необходимо произвести решения ОДУ с различными начальными условиями (вокруг интересующей точки). Для реализации также напишем функцию.
def drawPhasePortrait(args, deltaX = 1, deltaDX = 1, startX = 0, stopX = 5, startDX = 0, stopDX = 5, ts = 10, nt = 101): for y0 in range(startX, stopX, deltaX): for dy0 in range(startDX, stopDX, deltaDX): sol = calcODE(args, y0, dy0, ts, nt) plt.plot(sol[:, 1], sol[:, 0], 'b') plt.xlabel('x') plt.ylabel('dx/dt') plt.grid() plt.show()
Аргументами функции являются:
- args — Параметры ОДУ (см. шаг 1)
- deltaX — Шаг начальных условий по горизонтальной оси (переменной состояния)
- deltaDX — Шаг начальных условий по вертикальной оси (производной переменной состояния)
- startX — Начальное значение интервала начальных условий
- stopX — Конечное значение интервала начальных условий
- startDX — Начальное значение интервала начальных условий
- stopDX — Конечное значение интервала начальных условий
- ts — длительность решения
- nt — Количество шагов в решении (= время интегрирования * шаг времени)
Во вложенных циклах (строки 3-4) происходит перебор начальных условий дифференциального уравнения. В теле этих циклов (строки 5-6) происходит вызов функции решения ОДУ с заданными НУ и вывод фазовая траектории полученного решения.
Далее производятся нехитрые действия:
- Строка 7 — задается название оси X
- Строка 9 — задается название оси Y
- Строка 10 — выводится сетка на графике
- Строка 11 — вывод графика (рендер)
Шаг 4. Запуск построения
Запустить построение можно следующим образом:
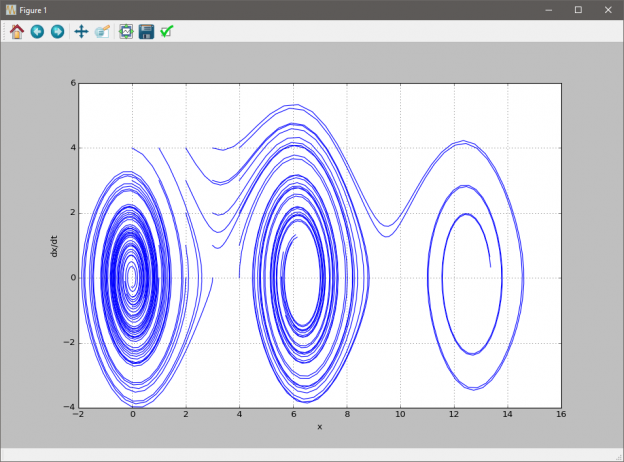
b = 0.25 c = 5.0 args=(b, c) drawPhasePortrait(args) drawPhasePortrait(args, 1, 1, -10, 10, -5, 5, ts = 30, nt = 301)
Строка 1-2 — задание значений параметрам ОДУ
Строка 3 — формирование вектора параметров
Строка 4 — вызов функции генерации фазового портрета с параметрами «по умолчанию»
Строка 5 — вызов функции генерации фазового портрета с настроенными параметрами
Итог
При запуске программы получаем следующий результат:
Полный текст программы под лицензией MIT (Использование при условии ссылки на источник):
# -*- coding: utf-8 -*- """ This function create a phase portrait of ode Created on Mon Jan 23 18:51:01 2017 Copyright 2017 Sinitsa AM site: digiratory.ru Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software. THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE. @author: Sinitsa AM digiratory.ru """ import numpy as np from scipy.integrate import odeint import matplotlib.pyplot as plt ''' In this function you should implement your ode for example: d*theta/dt = omega d*omega/dt = -b*omega - c*np.sin(theta) @args: y - state variable t - time b, c - args of ode ''' def ode(y, t, b, c): theta, omega = y dydt = [omega, -b*omega - c*np.sin(theta)] return dydt ''' Calculate ode @args: args - arguments of ODE y0 - The initial state of y yd0 - The initial state of derivative y ts - the duration of the simulation nt - Number steps if simulation (=ts*deltat) ''' def calcODE(args, y0, dy0, ts = 10, nt = 101): y0 = [y0, dy0] t = np.linspace(0, ts, nt) sol = odeint(ode, y0, t, args) return sol ''' Drawing Phase portrait of ODE in function ode() @args: args - arguments of ODE deltaX - step x deltaDX - step derivative x startX - start value of x stopX - stop value of x startDX - start value of derivative x stopDX - stop value of derivative x ts - the duration of the simulation nt - Number steps if simulation (=ts*deltat) ''' def drawPhasePortrait(args, deltaX = 1, deltaDX = 1, startX = 0, stopX = 5, startDX = 0, stopDX = 5, ts = 10, nt = 101): for y0 in range(startX, stopX, deltaX): for dy0 in range(startDX, stopDX, deltaDX): sol = calcODE(args, y0, dy0, ts, nt) plt.plot(sol[:, 0], sol[:, 1], 'b') plt.xlabel('x') plt.ylabel('dx/dt') plt.grid() plt.show() b = 0.25 c = 5.0 args=(b, c) drawPhasePortrait(args) drawPhasePortrait(args, 1, 1, -10, 10, -5, 5, ts = 30, nt = 301)
Синица А.М.: Построение фазовых портретов на языке Python [Электронный ресурс] // Digiratory. 2017 г. URL: https://digiratory.ru/?p=435 (дата обращения: ДД.ММ.ГГГГ).
Построение фазовых портретов на языке Python : 2 комментария
- Уведомление: Устойчивость нелинейных систем — Digiratory
- Уведомление: Оценка параметров ДУ в Python — Digiratory
Фазовый портрет для математического маятника

Рассмотрим систему

получающуюся из уравнения колебаний математического маятника х + sinT = 0 введением переменной у = х. Уравнение фазовых траекторий имеет вид

это уравнение с разделяющимися переменными, и его решения определяются формулой
Для того, чтобы построить фазовый портрет, необходимо взять семейство графиков функций у = 2(cosх + С), которое строится из графика функции у = cos ж элементарными преобразованиями, и извлечь корень из „положительной 41 (находящейся выше оси абсцисс) части каждого графика 3 . В результате получается портрет, представленный на рис. 23.1. Видны система замкнутых траекторий (циклов) 4 , окружающих положения равновесия и система незамкнутых траекторий^. Точки соответствуют значению С = — 1, циклы значениям — 1 1. Значению С = 1 отвечает пара неограниченных кривых, пересекающихся друг’ с другом на оси абсцисс при х = п + 2пк, внешний вид которых обманчив: на самом деле они имеют довольно сложную структуру, но это мы обсудим чуть позже.
Здесь следует отметить, что на самом деле один и тот же фазовый портрет соответствует многим системам. Так, уравнение фазовых траекторий системы

такое же, как и уравнение фазовых траекторий системы (23.1). Отличие состоит только в скорости, темпе прохождения траекторий. Поэтому для тог о, чтобы однозначно идентифицировать систему по фазовому
^Извлечение корня из графика функции достаточно несложная операция: в силу монотонности корня промежутки возрастания остаются промежутками возрастания, промежутки убывания промежутками убывания, экстремумы экстремумами. Единственное, о чем нужно помнить, что корень извлекается только из „положительной» части графика и что полученный результат надо отобразить с имметрично и в нижнюю полуплоскость (поскольку нам же надо нарисовать у = ±^/2(cos.e + С)). Правда, есть еще тонкость, связанная с извлечением корня вблизи нуля функции. Если график функции пересекает ось абсцисс (функция имеет ненулевую производную) в то чке х‘, то вблизи этой точки f(x) ~ к(х—х*) (к это как раз и есть производная), а //(ж) ~ ‘/кл/х — X” эта функция уже не пересекает ось абсцисс, а „втыкается» в нее (функция имеет бесконечную производную). Это. кстати, приводит к тому, что график корня из функции в нижней полуплоскости склеивается с графиком корня в верхней полуплоскости гладко, без углов. Если же исходная функция касается оси абсцисс, то в случае наличия второй производной в окрестности точки касания х* сама функция f(x) ~ к(х — х*) 2 , а корень из нее, соответственно, f(x) ~ /кх — х*. График такой функции пересекает ось абсцисс под ненулевым углом. В нашем случае это происходит при С = 1.
’Так называемые либрациопныа диижкпия.
‘ Гак называемые ротационные, движения.

Рис. 23.1: Фазовый портрет для уравнения математического маятника
портрету, надо в каждой точке каждой траектории еще пририсовать вектор скорости (или хотя бы указать его величину и направление). Обычно используют „промежуточный 11 вариант, более компактный, но достаточно информативный: вместо того, чтобы в каждой точке рисовать вектор скорости, на самой траектории стрелочкой обозначают направление движения по этой траектории. Направление движения определяют по тому, куда направлен вектор скорости. Правда, обычно для этого достаточно вычислить лишь одну компоненту (например, т). Поскольку, в силу пашей системы, х = у, при у > 0 получаем х > 0 значит, x(t) с течением времени возрастает и движение происходит слева направо. Соответственно в нижней полуплоскости х = у 11 они не лежат ни на одной из кривых. Это положения равновесия системы. Если мы подставим эти значения в систему, то увидим, что в этих точках х = у = 0, а поэтому и двигаться из них никуда не надо. Положения равновесия соответствуют стационарным решениям: когда x(t) и y(t) являются константами. Нетрудно проверить, что в общем случае постоянными решениями системы (23.1) являются те и только те, которые обращают обе правые части в нуль.
Определение 23.4 Особыми, точками [1] системы (23.1) называются точки (х, у), для которых правые части системы обращаются в нуль: f
Таким образом, нее оказалось более чем естественно: если решение постоянное, то траектория одна точка. Как раз такие решения и соответствуют точкам (2тгп, 0).

Как видно, вот эти особые точки окружены замкнутыми траекториями, отвечающими периодическим решениям. Найдем период для этих траекторий. Удобно „нумеровать* 1 их максимальным значением абсциссы, которое бы обозначим через xq, тогда С = — cos xq. уравнение траектории имеет вид
а поскольку из первою уравнения системы х = у. получаем, что связь между t их описывается формулой

В силу симметрии фазового портрета нам удобно посчитать лишь четверть периода когда х меняется от Хо до нуля:


Замена ? = sin(x/2) (с переобозначением ?о = sin(®o/2)) приводит этот интеграл к виду
Интеграл этот несобственный (на правом конце промежутка интегрирования), но сходящийся. Однако, к сожалению, в элементарных функциях он не выражается это так называемый эллиптический интеграл [2] . Тем более не выражается в элементарных функциях и зависимость x(t): функция, обратная к эллиптическому интегралу, называется эллиптической функцией, она относится к довольно обширному классу специальных функций [3] функций, достаточно часто возникающих при решении дифференциальных уравнений, но не выражающихся в элементарных функциях.
Таким образом, хотя решение нашей системы в элементарных функциях не выражается, мы все-таки умудрились в помощью фазовой плоскости достаточно детально разобраться в ее поведении.
Еще один интересный момент: период можно точно посчитать при С = 1 (поскольку под корнем оказывается просто квадрат косинуса половинного угла), но этот период оказывается . бесконечным: интеграл расходится! Как это понимать и не вкралась ли тут ошибка? Ошибки нет. Дело в том, что при С = 1 решение уже; не является периодическим (хотя визуально ясно видна замкнутая траектория это все-таки обман зрения). Экстремальная точка xq = я достигается за бесконечное время. Это один из интересных фокусов фазовой плоскости. Дело в том, что точки (7Г + 27ГП, 0), так же, как и точки (27гв, 0). являются особыми, это такие же положения равновесия (правда, неустойчивого, но об этом мы будем говорить позже), и из них ничего не выходит и в них ничего не входит. Удаление этих точек из картинки приводит к тому, что замкнутые вроде бы кривые распадаются на отдельные фраг менты. Каждый из этих фрагментов на самом деле и является отдельной фазовой траекторией, проходимой за весь промежуток времени t € (—ос,+ос). Эти траектории, начинающиеся и заканчивающиеся на особых точках, называют сепаратрисам,и [4] . Механическая интерггретация особых точек
(тг + 2тгп, 0) очевидна: это положения маятника, когда он стоит вертикально вверх. А сепаратрисы соответствуют очень специфическим движениям когда маятник, поднимаясь к верхней точке, никогда не достигает ее. но и никогда не останавливается [5] .
- [1] вНазьшаемые также точками покоя, или стационарными точками. Первый издвух приведенных терминов имеет происхождение из механики: этим точкам соответ-ствуют решения, которые описывают механическую систему, находящуюся в одномиз возможных состояний покоя. Второй происходи! из техники: стационарным режимом называется ситуация, когда техническое устройство работает без измененияего параметров. Термин же „особые точки** произошел из теории уравнений первогопорядка: если уравнение имеет вид с непрерывно дифференцируемыми функциями в числителе и знаменателе правойчасти, то при f(x,y) ф 0 мы оказываемся и условиях теоремы существования иединственности, при f(x,y) = 0. но д(х,у) ф 0 тоже (только надо поменять ролями переменные X и у и перейти к уравнению dx/dy = /(#, у)/д(х, у)), а вот когдаи числитель, и знаменатель обращаются в нуль вот тут-то все и начинается. Вэтих точках не то что просто условия теоремы не выполняются там само свойствосуществования и единственности по существу исчезает. Через такие точки можетпроходить как угодно много интегральных кривых. А может ни одной. Поведениетраекторий системы (23.1) вблизи особых точек мы будем изучать отдельно в главе24.
- [2] Термин „эллиптический” связан с тем, что этот интег рал возникает в задаче овычислении длины дуги эллипса.
- [3] Некоторые авторы к специальным функциям относят и такие функции, как sin ж,cos х и экспоненту. Действительно, ведь, например, тригонометрические функции невыражаются через „самые элементарные” функции многочлены, но регулярно возникают в геометрических соотношениях. Поэтому мы обозначили эти зависимостичерез sin® и cos ж, исследовали их структуру (вы это проходили еше в школе), итеперь пользуемся ими точно так же, как и полиномами. Для специалистов но уравнениям математической физики специальные функции (к которым, помимо эллиптических функций Якоби, функций Бесселя решений уравнения Бесселя относитсяеще много других функций) такой же привычный класс, как дли вас синусы,косинусы и экспоненты.
- [4] »От английского „separate” „разделять”. Сепаратрисы разделяют части плоскости, в каждой из которых фазовые кривые имеют свой характер поведения: в нашемслучае это части плоскости, где фазовые кривые замкнуты, и части плоскости, гдефазовые кривые незамкнуты.
- [5] Конечно, для того, чтобы ясно себе представить этот процесс, нужно опреде-лепное усилие воображения, но тут ничего не поделаешь: истинно математическоевоображение как раз и требуется в различных предельных, пограничных случаях.
Фазовые портреты «на пальцах» или что можно узнать о решениях диффура, не решая его
Очень часто в ряде наук встречается ситуация, когда модель рассматриваемого процесса сводится к дифференциальному уравнению. Причём, в большинстве реальных задач это уравнение довольно сложно решить, или совсем невозможно. И вот тут в полный голос звучит извечный вопрос: как быть?
Встречайте: фазовые портреты (они же фазовые диаграммы). Простым языком, фазовый портрет — это то, как величины, описывающие состояние системы (a.k.a. динамические переменные), зависят друг от друга. В случае механического движения это координата и скорость, в электричестве это заряд и ток, в известной популяционной задаче это количество хищников и жертв и т.д.
Чем хороши фазовые портреты? А тем, что их можно построить не решая динамические уравнения системы. В некоторых случаях построение фазового портрета становится совсем простой задачей. Однако, одновременно с этим, фазовые портреты дают вдумчивому наблюдателю очень много информации о поведении системы.
Начнём с простого примера — малых колебаний (так же называемых гармоническими). Малые колебания встречаются почти в каждой сфере естественных наук. Для определённости, будем рассматривать колебания металлического стержня, подвешенного за один из концов (частный случай так называемого физического маятника). Можно показать, что его колебания описываются следующим дифференциальным уравнением:

Где x — угол отклонения стержня от вертикали, точка над x означает производную по времени, а коэффициент перед синусом зависит от размера и массы стержня.
Если амплитуда (размах) колебаний достаточно мала, синус можно приближенно заменить его аргументом (вы ведь помните первый замечательный предел, нет?). В таком случае, уравнение принимает следующий вид:

Это уравнение легко решается регулярными методами, но, давайте, попробуем применить к нему метод фазовых портретов. Для этого, домножим уравнение на производную и проинтегрируем его один раз по времени:
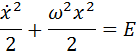
Получилось выражение, первый член которого выглядит как кинетическая энергия. Это не случайно — на самом деле мы получили именно закон сохранения энергии. Постоянная Е в правой части (полная энергия системы на единицу массы) может принимать различные значения, которые соответствуют разным начальным состояниям системы.

Полученный нами закон сохранения превратился в уравнение кривой на плоскости (x,u):
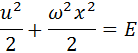
Для разных значений Е мы получим разные кривые. Нарисуем несколько таких линий для разных значений энергии:
По горизонтальной оси отложена величина x, по вертикальной — u
Каждая из полученных линий называется фазовой траекторией. Когда меняется состояние системы, изображающая её точка движется по одной из этих траекторий, стрелки указывают направление движения изображающей точки.
По графику видно, что значения скорости и координаты меняются циклическим образом, то есть периодически повторяются. Отсюда можно сделать вывод, что описываемая рассмотренным уравнением система будет совершать колебания. Бинго! Именно так ведёт себя маятник, и если решить уравнение, решение будет иметь вид периодических функций (а именно — комбинации синуса и косинуса).
Следует однако помнить, что замена синуса его аргументом оправдана лишь для малых углов отклонения (от 10 градусов и меньше), поэтому мы не можем доверять тем траекториям, которые выходят за границы области, ограниченной жирными пунктирными линиями, то есть из четырех приведенных траекторий лишь оранжевая достоверно отображает реальность. Кроме того, поскольку x это угол, то его значения, соответствующие 180 и -180 градусам описывают одно и то же положение стержня, то есть правая и левая пунктирные линии (тонкие) на графике это на самом деле одна и та же линия.
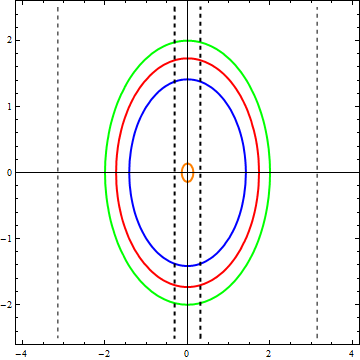
Теперь, поскольку нам понятна суть, можно перейти к чему-то посложнее. Выше мы очень сильно упростили уравнение и при этом ограничили себя только малыми колебаниями. Математик бы сказал, что мы линеаризовали уравнение и пренебрегли нелинейными эффектами. Так давайте включим в рассмотрение нелинейность. Вернёмся к самому первому уравнению — с синусом. Если мы повторим с ним то, что проделали с линейным уравнением, мы получим следующий закон сохранения:
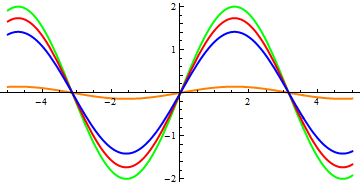
В зависимости от значения энергии, мы опять получаем разные кривые, которые приведены на следующем рисунке, причем выбраны те же значения энергии, что и на первой диаграмме, и те же цвета для линий.
По горизонтальной оси отложена величина x, по вертикальной — u
Как видите, процессы происходящее в системе стали более разнообразными:
При малых энергиях (оранжевая и синяя траектории) существует колебательный режим, но колебания уже не являются гармоническими — фазовые траектории уже не имеют форму эллипсов.
При больших энергиях (зеленая траектория) колебаний уже нет, вместо этого мы получаем вращательное движение с переменной скоростью. И действительно, если достаточно сильно «толкнуть» стержень, он будет вращаться, замедляясь при подъёме и ускоряясь при спуске.
При определенном промежуточном значении энергии получается особый набор траекторий, которые отделяют друг от друга области соответствующие разным типам движения и поэтому называются сепаратрисами. И да, значение энергии для красной кривой было выбрано мной именно так, чтобы в нелинейном случае получилась сепаратриса. Каждая ветвь сепаратрисы это траектория, соответствующая особому типу движения. Посмотрим на диаграмму: движение начинается с очень маленькой скоростью от одного крайнего положения стержня, при приближении к положению равновесия скорость растёт, а после изображающая точка все более замедляясь уходит к крайнему положению, где и останавливается. Это соответствует тому, что мы поднимаем стержень вертикально вверх и отпускаем его, проносясь через положение равновесия он поднимается к верхней точке с другой стороны и останавливается.
А теперь давайте посмотрим насколько близки к истине наши выводы, сделанные на основе фазовых портретов. Перед вами график решения линейного уравнения:
По горизонтальной оси отложено время, по вертикальной — x

По горизонтальной оси отложено время, по вертикальной — x
Цветовая маркировка на этих графиках такая же, как и на фазовых портретах. Судить о том, насколько верные выводы были сделаны на основе фазовых портретов я предоставлю вам, дорогие читатели. Обращу ваше внимание только на один момент — колебания в линейном случае происходят синхронно — с одной и той же частотой. В нелинейном же случае, частота колебания с большей амплитудой (синяя линия) оказывается меньше, чем у колебания с малой амплитудой (оранжевая линия). Это служит еще одним подтверждением того, что нелинейные колебания не являются гармоническими.
Ну и напоследок: это всего лишь поверхностный экскурс в метод фазовых портретов, и словосочетание «на пальцах» попало в заголовок неспроста. Те же, кто решит углубиться в перипетии данного предмета, увидят, что за фазовыми портретами скрывается намного большее.
- математика
- динамические системы
- качественный анализ
- диффуры
12. ОСОБЫЕ ТОЧКИ ФАЗОВЫХ ПОРТРЕТОВ ДИНАМИЧЕСКИХ СИСТЕМ
Каждая динамическая система имеет свой фазовый портрет. На фазовом портрете изображаются особые точки (точки положения равновесия, критические, неподвижные точки), которые позволяют без решения дифференциального уравнения или отображений предсказать поведение динамической системы. Мы уже неоднократно упоминали особые точки. В этой главе мы рассмотрим способы их нахождения и их свойства несколько подробнее.
12.1 Дифференциальные уравнения и особые точки
Через каждую точку фазовой плоскости проходит только одна фазовая траектория: если эту точку выбрать в качестве начального состояния системы, дальнейшее движение системы будет определено однозначно. Это движение идёт вдоль фазовой траектории, проходящей через данную точку фазовой плоскости; фазовые траектории системы не пересекаются. Исключение составляют лишь отдельные, изолированные точки фазовой плоскости. Такие точки, через которые проходит более одной фазовой траектории или не проходит ни одной траектории, называются особыми . Фазовый портрет даёт наглядное графическое представление о возможных движениях изучаемой динамической системы. Если фазовое пространство X представляет собой многомерное пространство или область в нем, а время непрерывно и если известна скорость движется каждой точки x фазового пространства (известна вектор-функция скорости v ( x )), то траектория точки х 0 Х будет решением автономного дифференциального уравнения dx v ( x ) с начальным dt условием x (0). Заданная таким образом динамическая система называется фазовым потоком для автономного дифференциального уравнения. В пространстве состояний создаётся модель динамической системы, включающая набор переменных входа, выхода и состояния, связанных между собой дифференциальными уравнениями 1-го порядка в матричной форме. Особая точка векторного поля – определяет положение равновесия. Это точка, в которой векторное поле равно нулю; положение равновесия или точка покоя динамической системы, определяемая данным векторным полем: фазовая траектория с началом в особой точке состоит в точности из этой особой точки, а соответствующая ей интегральная кривая – прямая, параллельная оси времени. Критическая (неподвижная) точка дифференцируемой функции действительной или комплексной переменной f : D R , где R – область в R n , – любое её значение х 0 , при котором все частные производные f равны нулю, f ( x 0 )=0. Это условие эквивалентно обращению в ноль дифференциала функции в данной точке, а также равносильно горизонтальности касательной гиперплоскости к графику функции. Это условие является необходимым (но не достаточным) для того, чтобы внутренняя точка области могла быть точкой локального минимума или максимума дифференцируемой функции. Значение функции в критической точке называется критическим значением. Для дифференцируемой функции нескольких переменных критическая точка там, где все частные производные равны нулю. Точка равновесия – такая точка в пространстве координат динамической системы , генерируемой автономной системой ОДУ, которая характеризует ее состояние равновесия в данный момент. Это одна из стационарных точек функции , описывающей поведение системы; все частные производные функции обращаются в точке равновесия в нуль . Решение, которое со временем не меняется. Сингулярная особая точка — точка, в которой математическая функция стремится к бесконечности или имеет какие-либо иные нерегулярности поведения . Интерес к неподвижным точкам заключается в том, что точки, где функция имеет локальные экстремумы являются критическими точками.
http://profbeckman.narod.ru/ В критической точке график f ( x ) имеет горизонтальную касательную и производная от функции равна нулю. Если g ( x , y ) – дифференцируемая функция двух переменных, то g ( x , y )=0 – неявное уравнение кривой. Критическая точка такой кривой для проекции, параллельной оси y (отображение ( x , y )→ x ), является точкой кривой, где g x , y 0 . y Здесь касательная к кривой параллельна оси y и в этой точке g не определяет неявную функцию от x до y . Критическая точка ( x 0 , y 0 ) — одновременно точка бифуркации, так как, как правило, при изменении х есть две ветви кривой на стороне х 0 и ноль с другой стороны. Рис. 1. Абсциссы (координаты х) красных кружков – стационарные точки, голубые квадраты – точки перегиба. Функция f ( x ) имеет критическую точку x 0 с критическим значением y 0 , тогда и только тогда, когда ( x 0 , y 0 ) является критической точкой ее графа для проекции, параллельной x — оси с тем же критическим значением y 0 .Например, критические точки единичной окружности уравнения x 2 + y 2 -1=0 равны (0, 1) и (0, -1) для проекции, параллельной оси y , и (1, 0) и (-1, 0) для направления, параллельного оси х . Если рассматривать верхнюю половину круга как график функции
| f ( x ) | 1 x 2 то x =0 – единственная критическая точка с критическим значением 1. |
Критические точки окружности для проекции, параллельной оси y, точно соответствуют точкам, где производная от f не определена. Пример 1. Функция f ( x )= x 2 +2 x +3 всюду дифференцируема, производная f ‘( x )=2 x +2. Функция имеет единственную критическую точку -1, т. к. именно это значение х 0 получается из 2 x 0 +2=0. Точка х 0 – глобальный минимум f , критическое значение f (-1)=2. График f – вогнутая парабола, критической точкой является абсцисса экстремума, где касательная линия горизонтальна, а критическое значение – ордината экстремума: пересечение этой касательной с осью y . Пример 2. Функция f ( x )= x 2/3 определена для всех x и дифференцируема при x ≠0, производная f ‘( x )=2 x -1/3 /3. Так как f ‘( x )≠0 для x ≠0, то единственно возможной критической точкой f является x =0. Поскольку производная не существует в 0, то одни авторы считают её критической, а другие нет. График функции f имеет точку возврата в этой точке с вертикальной касательной. Соответствующим критическим значением f (0)=0. Пример 3. Функция f ( x )= x 3 -3 x +1 всюду дифференцируема, причём производная f ‘( x )=3 x 2 -3. Она имеет две критические точки при x =-1 и x =1 соответствующими критическими значениями: f (-1)=3 – локальное максимальное значение, и f (1)=-1 – локальное минимальное значение f . Эта функция не имеет глобального максимума или минимума. Так как f (2)=3, то критическое значение может быть достигнуто и в некритической точке. Геометрически это означает, что горизонтальная касательная линия к графу в одной точке ( x =-1) пересекает график под острым углом в другой точке ( x =2) . Пример 4 . Функция f ( x )=1/ x не имеет критических точек. Точка x=0 не рассматривается как критическая точка, потому что она не включена в область определения функции . Рис. 2. График f(y) (слева) и его фазовая линия (справа). Здесь а и с — стоки, а b — источник. В любой малой окрестности фазового пространства, не содержащей особых точек, векторное поле можно выпрямить подходящей заменой координат – тем самым, поведение системы вне особых точек устроено одинаково и очень просто. Напротив, в окрестности особой
http://profbeckman.narod.ru/ точки система может обладать очень сложной динамикой. Говоря о свойствах особых точек векторных полей, обычно подразумевают свойства соответствующей системы в малой окрестности особой точки. В простейшем случае однопараметрического автономного ОДУ dy f ( y ) фазовая dx плоскость вырождается в прямую линию (её строят вертикально, рис.1 справа) или горизонтально. Это даёт простой метод анализа поведения динамической системы. Фазовая линия, представляет собой интервал области производной. Критические точки (т.е. корни производной, точки у ) такие, что , а интервалы между критическими точками обозначены стрелками: интервал, на котором производная положительна, имеет стрелку, указывающую в положительном направлении вдоль линии (вверх) и интервал, на котором производная отрицательно имеет стрелку, указывающую в отрицательном направлении вдоль линии (вниз). Примеры — фазовые линии, соответствующие функциям, не меняющие знак: если , то каждая точка — устойчивое равновесие (не меняется); еслидля всех , то всегда увеличивается, и если тогда всегда уменьшается. Простейшими нетривиальными примерами являются экспоненциальная модель роста/радиоактивный распад (одно неустойчивое/устойчивое равновесие) и модель логистического (два равновесия, одно устойчиво, одно неустойчиво). Приведём несколько примеров анализа простых ОДУ с использованием фазовой линии. Рис. 3. К задаче 1: б — фазовая линия; в — типичные интегральные кривые. Пример 5 . Для ОДУ y ‘=3 y : найти критические точки, нарисовать фазовую линию, классифицировать критические точки по стабильности и нанести на график некоторые решения. Для y ‘=3 y единственная критическая точка y =0. График f ( y ) – прямая линия, причём y ‘>0 при у >0 и у ‘<0 при y <0. Поместим большую точку в критической точке. Так как y '>0 в интервале y >0, то по вертикальной линии направляем стрелку вверх, аналогично для интервала y <0 откладываем стрелку вниз. Поскольку стрелки идут в разные стороны от критической точки, равновесие неустойчиво. Рядом с фазовой линией построим график кривых для самой функции f ( t )= t 3 + c (для простоты считаем c =0). Равновесное решение соответствует критической точке: это горизонтальная линия y ( t )=0. Решения расходятся от абсциссы в разные стороны при увеличении t. Положение равновесия неустойчиво, о чём и свидетельствовала фазовая линия. Рис. 4. К примеру 1: а - график f(y): б - фазовая линия; в - типичные интегральные
http://profbeckman.narod.ru/ Пример 6. Фазовая линия для логистического уравнения y ‘= k 0 (1- y / M ) y . Критические точки: y =0 и y = M . Решения сдвинуты во времени. Точка равновесия у =0 неустойчива, точка у = М – устойчива. Пример 7. Полу-устойчивое и полу-неустойчивое положение равновесия. ОДУ y ‘= y 2 имеет одну полустабильную точку равновесия при у =0, y ‘ — всегда положителен (за исключением у =0). Критическая точка может быть устойчивой, неустойчивой или полуустойчивой, что демонстрируют исходящие (или входящие) в них стрелки. Если обе стрелки направлены на критическую точку, она устойчива (сток): близкие решения асимптотически сходятся к критической точке, а решение устойчиво при малых возмущениях, что означает, что если решение нарушено, оно снова вернется к устойчивой точке. Если обе стрелки указывают направление от критической точки, она неустойчива (источник): близкие решения будут расходиться от критической точки, а решение будет неустойчивым, при малых возмущениях решение обратно не вернётся. Если одна стрелка направлена на критическую точку и одна – от нее, то она полустабильна (узел): она устойчива в одном направлении (где стрелка направлена на точку) и неустойчива в другом направлении (где стрелка направлена от точки). Рис. 5. К примеру 2: а – график f(y): б – фазовая линия; в – типичные интегральные кривые. Поскольку нелинейные уравнения не имеют аналитического решения, то в теории динамики существенное внимание уделяется методам линеаризации, которые позволяют найти критические точки и дать им разумную интерпретацию. Переход от нелинейной к линейной системе упирается в проблему топологической эквивалентности. Особая точка (неподвижная точка, положение равновесия, стационарная точка, точка покоя, критическая точка) динамической системы описываемое системой ОДУ – решение, которое не изменяется со временем. Геометрически равновесие – точка в
| фазовом пространстве. | |
| Система ОДУ | (1) |
| x F ( x ) |
имеет равновесное решение x ( t )= x 0 , если F ( x 0 )=0. Нахождение равновесия, т.е. решение уравнения F ( x )=0 просто только в некоторых специальных случаях. Если х 0 – особая точка дифференцируемого векторного поля F ( x ), являющегося правой частью автономной системы Ур.1, а F / x – производная отображения F , то система линейных дифференциальных уравнений
| A | F | x 0 | , | y x x 0 | (1а) |
| y Ay , | x |
называется линеаризацией системы (1) в особой точке x 0 , поле Ау – линейной частью поля F в точке х 0 , а А – оператор этой линейной части или оператор линеаризации. Две системы дифференциальных уравнений (или, что то же самое – два векторных поля) топологически эквивалентны в окрестности особых точек, если существует гомеоморфизм (взаимно однозначное и взаимно непрерывное отображение), переводящий особую точку первой системы и траектории, лежащие в некоторой ее окрестности, в особую точку и траектории второй системы с сохранением ориентации траекторий. Гомеоморфизм – взаимно однозначное соответствие между двумя топологическими пространствами, при котором оба взаимнообратных отображения, определяемые этим
http://profbeckman.narod.ru/ соответствием, непрерывны. Эти отображения называются гомеоморфными, или топологическими, отображениями, а также гомеоморфизмами, а о пространствах говорят, что они принадлежат одному топологическому типу называемые гомеоморфными, или топологически эквивалентными . Они являются изоморфными объектами в категории топологических пространств и непрерывных отображений . Топологическая эквивалентность – топологическое отношение между топологическими пространствами; топологические пространства X и Y называются топологически эквивалентными, если они гомеоморфны, т.е. если существует гомеоморфизм пространства X на пространство У . Топологическая эквивалентность является рефлексивным, симметричным и транзитивным бинарным отношением на классе всех топологических пространств. В соответствии с этим совокупность всех топологических пространств разбивается на попарно не пересекающиеся классы топологической эквивалентности . Теорема Гробмана-Хартмана. Непрерывно дифференцируемое векторное поле с гиперболической особой точкой в некоторой окрестности этой точки топологически эквивалентно своей линейной части . Локальный фазовый портрет гиперболической точки нелинейной системы эквивалентен таковому для линейной. Из этой теоремы вытекает, что качественное поведение решений автономной системы дифференциальных Ур.(1) в окрестности гиперболической особой точки полностью определяется поведением решений системы линейных дифференциальных уравнений с постоянным оператором (матрицей) линейной части поля в этой точке. Линейная система ОДУ называется гиперболической , если все её собственные значения якобиана (вообще говоря, комплексные) имеют отличные от нуля вещественные части. Особая точка (положение равновесия) системы дифференциальных уравнений (1) называется гиперболической , если ни одно собственное значение оператора линейной части поля в этой точке не лежит на мнимой оси, т.е. если её собственное значение отлично от нуля. Если собственное значение точки равно нулю, то точку называют негиперболической. В этом случае система неустойчива и возможны бифуркации. Гиперболическая периодическая точка – периодическая точка, у которой все мультипликаторы (производная в неподвижной точке) по модулю отличны от единицы. Это периодическая точка, орбита которой является гиперболическим множеством. Важный частный случай – гиперболическая неподвижная точка . Неподвижная точка гиперболична, если имеет производную, отличную от +, т.е. если среди всех мультипликаторов нет равных по модулю единице. В одномерной (скалярной) динамической системе x ‘= f ( x ) равновесие имеет место при f ( x )=0 (рис. 6). Якобиан в каждом равновесии есть J = f ‘( x ). Равновесие асимптотически стабильно, когда f ‘( x )<0; это означает, что наклон f отрицателен. Оно нестабильно, когда f '( x )>0. Слева два равновесия на рис. 6 гиперболические ( f ‘(x) 0), другие негиперболические поскольку наклон (собственное значение) есть нуль. Тем не менее, негиперболическое равновесие системы устойчиво, если функция изменяет знак с положительного на отрицательный при равновесии. Рис. 6. Равновесие одномерной системы x’=f(x) в точках где f(x)=0. Как уже упоминалось, двумерную систему линейных дифференциальных уравнений можно записать в виде
| http://profbeckman.narod.ru/ | ||||||||||||||||
| x , y | dx | |||||||||||||||
| f 1 | x | ax by | ||||||||||||||
| dt | (2) | |||||||||||||||
| x , y y | dy | |||||||||||||||
| f | 2 | cx dy | ||||||||||||||
| dt | ||||||||||||||||
| комплексно сопряжённые. | ||||||||||||||||
| При равновесии | ||||||||||||||||
| ax by 0 | ||||||||||||||||
| cx dy 0 | (3) | |||||||||||||||
| Система (2) в матричной форме | ||||||||||||||||
| d x | a | b x | ||||||||||||||
| (4) | ||||||||||||||||
| dt y | c | d y | ||||||||||||||
| dx | ||||||||||||||||
| или Х | АХ | |||||||||||||||
| dt | a | b | ||||||||||||||
| где А – 2х2 матрица коэффициентов | и ( x,y ) – вектор координат двух независимых | |||||||||||||||
| c | d | |||||||||||||||
x переменных . y Для определения особых точек используют собственные значения уравнения Ах = х находят решением характеристического уравнения. Обычно классификацию положений равновесия линейной системы, основанную на собственных значениях. Однако тип точки равновесия можно определить и без вычисления собственных значений 1 , 2 , а зная лишь только определитель матрицы detA и её след trA . Напомним, что следом матрицы называется число, равное сумме диагональных
| элементов: | a | b | , trA = a + d , detA = ad — bc . Действительно, характеристическое уравнение |
| c | d |
| матрицы имеет следующий вид: | |||||||||||
| λ 2 −( a + d )λ+ ad − bc =0. | (5а) | ||||||||||
| или | |||||||||||
| λ 2 − trA λ+ detA =0. | |||||||||||
| где р = a+d = tr ( A ), q = ad-bc , = detA = ad-bc | (5б) | ||||||||||
| Собственные значения 1 и 2 | линейного оператора А находят по формуле | ||||||||||
| 1 | 1 | trA | , | ||||||||
| 2 4 q | (6) | ||||||||||
| D | |||||||||||
| 1,2 | 2 | 2 | |||||||||
где дискриминант, D =( trA ) 2 −4 detA . Собственные вектора: V 1 и V 2 – корни уравнения bV 2 ( d a ) V c 0. Таким образом, бифуркационная кривая , разграничивающая различные режимы trA 2 устойчивости, представляет собой параболу на плоскости ( trA , detA ): det A .2 Выше параболы находятся точки равновесия типа фокус и центр. Точки типа «центр» расположены на положительной полуоси 0 y , т.е. при условии trA =0. Ниже параболы находятся точки типа «узел» или «седло». Сама парабола содержит дикритические или вырожденные узлы. Устойчивые режимы движения существуют в левом верхнем квадранте бифуркационной диаграммы. Остальные три квадранта соответствуют неустойчивым положениям равновесия.
http://profbeckman.narod.ru/ Условие detА =0 определяет линию вырожденных особых точек, среди которых можно выделить вырожденный плоский седло-узел, имеющий, как правило, один узловой и два седловых сектора. Невырожденные седло, узел и фокус являются гиперболическими особыми точками. Центр к гиперболическому положению равновесия не относится. Гиперболичны те положения равновесия, для которых собственные значения матрицы коэффициентов detA линейной системы ОДУ лежат вне мнимой оси. Особая точка означает, что в стационарном состоянии значения переменных в системе не меняются со временем, т.е. в одномерном случае скорость изменения значений dx/dt = 0 (и следовательно) f(x)= 0. Корни этого алгебраического уравнения – стационарные состояния. В двумерном случае особая точка кривой, заданная уравнением F ( x,y )=0, – точка
| P 0 ( x 0 , y 0 ) такая, что | F | F | 0 . Если при этом не все вторые частные | ||
| x | x 0 , y 0 | y | x 0 , y 0 | ||
производные функции F ( x, у ) в точке P 0 равны нулю, то особая точка называется двойной. Если наряду с обращением в нуль первых производных в точке М 0 обращаются в нуль и все вторые производные, но не все третьи производные равны нулю, то особая точка называется тройной, и т.д. Рис. 7. Точки равновесия линейной автономной системы и бифуркационные кривые. Они же возникают и в нелинейных автономных системах при их линеаризации. а — виды фазовых портретов, б — демонстрация устойчивости особых точек. Здесь trA=a+d=р detA=ad-bc=q. Рис. 8. Виды фазовой плоскости в зависимости от локализации собственных значений. Из уравнения F ( x,y )=0 ни одно из переменных x,y не может быть выражено как функция другого даже в как угодно малой окрестности точки P 0 . Если вторые частные
http://profbeckman.narod.ru/ производные не все одновременно обращаются в нуль в точке P 0 (двойная особая точка), то поведение кривой в окрестности P 0 во многом определяется знаком :
| 2 F | 2 F | 2 F | 2 | (7) | ||||
| 2 | 2 | |||||||
| x | y | |||||||
| P | P | x y | P 0 | |||||
| 0 | 0 | |||||||
Если Δ>0, то особая точка называется изолированной; например, у кривой у- х 4 +4x 2 =0 начало координат есть изолированная особая точка (рис. 9.1). Если Δ
| t | ||
| x x 0 | x ( t ) x (0) e | |
| y 4 y 0 | y ( t ) y (0) e 4 t | |
Фазовый портретстабильный седло, точка (0,0) — стабильная точка равновесия. Рис. 11. К примеру 9 . Пример 9 : Дана система ОДУ
| t | ||
| x x 0 | x ( t ) x (0) e | |
| y 4 y 0 | y ( t ) y (0) e 4 t | |
http://profbeckman.narod.ru/ Фазовый портрет – седло. Фазовая траектория попадает в точку (0,0) только если начальное условие было задано в начале кооордитат. Остальные траектории никогда не попадают в точку (0,0). Рис. 12. К примеру 10.
| Пример 10. Устойчивость седловой точки. Имеем | ||||||||
| 2 | 1 | |||||||
| x 2 x y 0 | ||||||||
| систему уравнений | x Ax | A | ||||||
| 2 | 1 | |||||||
| y 2 x y 0 | ||||||||
| Собственное | значение 1 | 1,5616 | 2 | 2,5616 | ||||
| Собственные | вектора V 1 | 0,2703 | V 2 | 0,8719 | ||||
| 0,9628 | 0,4896 | |||||||
| Стабильноеседло | Нестабильное седло | |||||||
| 1 1 | ||||||||
| Пример 11 . У системы | x x y 0 | |||||||
| xAx A | . Собственные значения | |||||||
| 4 | 1 | |||||||
| y 4 x y | ||||||||
равны +1,7321 i . Так как реальные части собственных значений равны нулю, то реализуется фазовая плоскость, в которой точкой равновесия является центр. Рис. 13. К примеру 11. В анализе поведения решений дифференциальных уравнений на плоскости удобно пользоваться методом изоклин. Изоклина – линия на плоскости, в каждой̆ точке которой, касательныӗ к фазовым траекториям исследуемой̆ системы уравнений имеют один угол наклона. Г лавные изоклины – нуль-изоклины, фазовые траектории которых проходят под углом φ=0 о (изоклина горизонтальных касательных) и φ=90 о (изоклина вертикальных касательных). При уравнениях имеющих вид: dx/dt=f 1 (x, y), dy/dt=f 2 (x,y) уравнение изоклины записывается как: dy/dx=f 2 (x, y)/f 1 (x,y)=A=const . Для изоклины горизонтальных касательных уравнение принимает вид: dy/dx= (f 2 (x,y) )/ (f 1 (x,y) ) =tg0 о =0 или f 2 (x,y)=0; для изоклины вертикальных касательных : dy/dx= (f 2 (x,y) )/( f 1 (x,y) ) tg90 о =∞ или P(x,y)=0. Коротко остановимся на линейных системах уравнений высоких порядков. При их решении обычно исходное уравнение представляют в виде системы линейных уравнений, решения которых довольно хорошо отработаны.
| Пример 12. Линейное уравнение 2-го порядка | ||||||||||||
| x ax bx 0 | ||||||||||||
| с постоянными вещественными коэффициентами a, b, можно свести к системе | ||||||||||||
| x y , | y bx ay . | |||||||||||
| Фазовые траектории этой системы задают фазовые траектории на плоскости x , x . | ||||||||||||
| Характеристическое уравнение: 2 | a b 0, . | |||||||||||
| Можно показать, что практически всегда систему высокого порядка можно свести | ||||||||||||
| к большой системе ОДУ первого порядка. | ||||||||||||
| x 1 ( t ) | F 1 ( x 1 , x 2 . t | F 1 | ||||||||||
| ( x , t ) | ||||||||||||
| x 2 ( t ) | F 2 ( x 1 , x 2 . t | F 2 ( x , t ) | ||||||||||
| d | . | . | . | (8) | ||||||||
| dx | ||||||||||||
| dt | dt . | . | . | |||||||||
| . | . | . | ||||||||||
| x ( t ) | F | ( x , x . t | F | |||||||||
| ( x , t ) | ||||||||||||
| n | N | 1 2 | n | |||||||||
http://profbeckman.narod.ru/ Поведение системы уравнений первого порядка можно визуально интерпретировать строя фазовые траектории x ( t ) для различных начальных условий x ( t 0). Если местоположения всех неподвижных точек (точки, где dx 0 ) на фазовой dt плоскости установлены, то их можно использовать как реперные точки, вокруг которых исследуется фазовое поведение. В каждой неподвижной точке, линеаризацию проводят, разлагая Ур.(8) в ряд в виде x x fix Если собственное значение вещественно, то любая точка, лежащая в направлении собственного вектора, будет развиваться по прямому пути, параллельному собственному вектору. Если действительное собственное значение отрицательно, то прямой путь будет асимптотически приближаться к началу координат; если собственное значение положительно, траектория будет расходиться по прямому пути к бесконечности. Если собственное значение является мнимым, то траектория будет циркулировать вокруг неподвижной точки с частотой, пропорциональной величине собственного значения. Если собственное значение комплексно, его траектория будет циркулировать с частотой, пропорциональной ее мнимой части, и расходиться от или сходиться к неподвижной точке. Если какая-либо из неподвижных точек имеет собственное значение с положительной вещественной частью, неподвижная точка не может быть устойчивой – это потому, что «типичные» точки в окрестности неподвижных точек будут обладать некоторой компонентой неустойчивого собственного вектора. Рис. 14. К примеру 13 . Пример 13 . Построить фазовые траектории системы
| k | 2 | x 0 , | где | d 2 x | , | k можно | рассматривать, | как | |||||||||||||||||||||||||||||||||||||||||||||
| dt 2 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| частоту колебаний n . | x | x | |||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 2 | 1 | k | 2 | 2 | 2 | |||||||||||||||||||||||||||||||||||||||||||||||
| dx dx | dx | x 2 C | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Решение x | x | k | x ; | xdx k | xdx | ; | x | x | C ; x | A | |||||||||||||||||||||||||||||||||||||||||||
| dt | dt | dx | k 2 | k 2 | |||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 2 | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| x | 2 | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| x | – эллиптическое уравнение. | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| A 2 | A 2 k 2 | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| Пример 14 . Определить фазовый портрет уравнения x | kx 0 , где k -положительно (колебания | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| маятника около верхнего положения неустойчивого равновесия). | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| x C 1 e | kt | C 2 e | kt | , | |||||||||||||||||||||||||||||||||||||||||||||||||
| Решение: | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| y C | ke kt C | 2 | ke | kt . | |||||||||||||||||||||||||||||||||||||||||||||||||
| 1 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Рис. 15. К примеру 14. | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Фазовые | траектории | задаются | уравнением | x 2 | y 2 | 1, | |||||||||||||||||||||||||||||||||||||||||||||||
| C | Ck | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| представляющее собой уравнение семейства гипербол (рис. 14). При | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| С=0 имеются две асимптоты этого семейства гипербол, | проходящие | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| y | x | ||||||||||||||||||||||||||||||||||||||||||||||||||||
| через | начало координат: | k | . Начало | координат | является | ||||||||||||||||||||||||||||||||||||||||||||||||
| k x | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| x | |||||||||||||||||||||||||||||||||||||||||||||||||||||