Назначение и виды энкодеров
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.

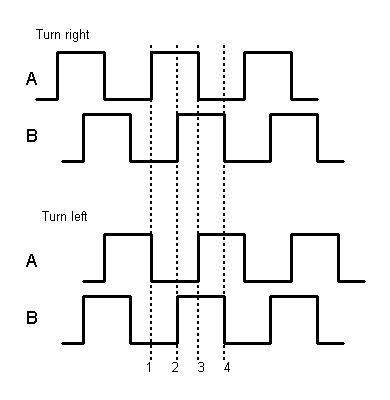
Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Подключение
В простейшем случае, если позволяет ситуация, выход энкодера можно подключить ко входу счетчика и запрограммировать его на измерение скорости.
Но, как правило, энкодер используется совместно с контроллером. К контроллеру подключаются все необходимые выходы, и его программа рассчитывает скорость, ускорение, положение объекта с необходимыми коэффициентами и размерностями.
Например, энкодер установлен на валу электродвигателя, который перемещает одну деталь по направлению к другой. Путем вычислений на экране оператора отображается зазор между деталями, а при достижении некоторого минимального зазора движение деталей прекращается, чтобы избежать их повреждения.
Также преобразователи угловых перемещений нередко используются в качестве элемента обратной связи на валу двигателя, подключенного через частотный преобразователь. В этом случае энкодер устанавливается на валу двигателя или редуктора, и подключается к частотнику через специальную плату сопряжения. Таким образом, появляется возможность точного позиционирования поддержания нужной скорости и момента двигателя.
Ремонт энкодера магнитолы Gamma V

Думаю, я не один, у кого с магнитолой приключилась такая беда. Речь идет о преждевременной кончине энкодера, отвечающего за включение/выключение магнитолы, а также за регулирование громкости и других параметров. Глюк заключается в следующем — при вращении регулятора параметры скачут в хаотичном порядке.

На регулировку басов и прочего можно было бы забить, но регулировать громкость необходимо.
В поисках решения проблемы на одном из форумов нашел такую идею — капнуть немного масла в энкодер. Попробовал — не помогло.
Решил просто заменить его на новый, но вот печаль — я не нашел подходящего ни в местных радиомагазинах, ни в интернет-магазинах. Есть что-то подобное на Али, но с другим посадочным пеньком для крутилки регулятора. Решил, что куплю на Али подходящий по размеру, выну из него потроха, и вставлю в корпус от своего энкодера. При ьзаказе нужно знать, какое количество щелчков у нашего энкодера, сейчас уже точно не помню, вроде 30, или 32.
Выпаивать энкодер крайне желательно при наличии оловоотсоса. За неимением этого девайса, в процессе демонтажа я оторвал у энкодера одну ногу. Приуныв, решил поискать недорогую Гамму для раздербана.
И тут я вспомнил, про валявшуюся где-то панель от магнитолы Sony, которую безжалостно разгрызла, от чего-то психанув однажды, моя собака. Энкодер в ней оказался крупнее того, что мне нужен.

Решил, пофиг на Гамму, надо брать 2-диновую на Андроиде. Под это дело я даже раздобыл соответсвующую рамку. Но бюджет заставлял откладывать покупку на неопределенное время. А без музыки тоскливо.
В общем, решил я почистить и впаять старый энкодер на место и попробовать, что произойдет.
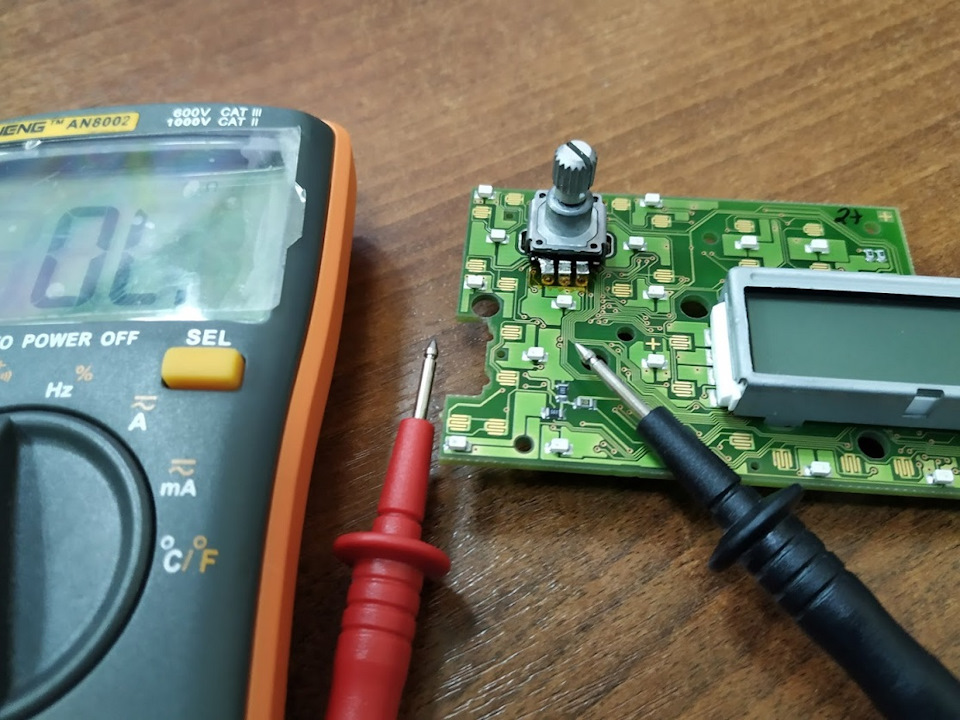
Протер все внутренности, поправил помятые внутренние ножки, собрал энкодер. На этом этапе можно провести примитивную проверку работоспособности. Включив прибор в режим прозвонки, кидаем щупы на среднюю и любую из крайних лап. При повороте энкодера на один щелчок, состояние будет меняться с 0 на 1, и так дискретно с каждым щелчком. Если состояние меняется равномерно, без сбоев, то есть надежда, что девайс будет жить.
Впаял энкодер. Затем припаял оторванную лапу, сначала в плату, потом к корпусу. Из корпуса торчала совсем малая часть оторванной лапки, пришлось слегка подрезать пластик вокруг, чтобы было, за что припаять. После впаивания прозвонку проводить бесполезно, прибор будет показывать КЗ во всех случаях. Почему так — ХЗ, я не электронщик)

Итог — магнитола работает, громкость и другие параметры регулируются четко, без глюков.
Надолго ли хватит такого решения покажет время.
Всем добра!
Что такое энкодер в магнитоле
Иван Осокин
Оцените автора
Добавить комментарий Отменить ответ
Свежие записи
- Капуста при диете для похудения: какой сорт выбрать?
- Эфир (ETH)
- Бордюры
- Этика использования готовых аккаунтов в социальных сетях: Правила и ограничения
- Карьера после 11 класса – востребованные профессии и лучшие учебные заведения для выбора
Вам также может понравиться
Металлические уличные скамейки – это неотъемлемая
Аль Сафа – один из самых престижных районов Дубая
В мире, где информации становится все больше, необходимо
Петербургский рынок аренды офисных помещений — это
Видеонаблюдение и СКУД постепенно отходят на второй план.
Любые современные моющие средства, будь то стиральный

Возможно, кто-то уже слышал подобного рода сокращение.

Многим пользователям компании Ростелеком интересно
Инкрементный энкодер

Раньше в своих поделках на микроконтроллерах всегда обходился кнопками, но вот недавно на разборку случайно попала в руки аппаратурка с энкодерами, вот и решил попробовать этот девайс в деле.
Энкодеры обычно применяются в магнитофонах для регулировки громкости и прочих настроек: тембр, баланс, выбор меню, настройка радиостанций. В общем применяются энкодеры там, где раньше использовали переменные резисторы.

Главное преимущество энкодера перед переменными резисторами в том, что он вращается непрерывно. В принципе, резистор тоже можно доработать, чтоб он непрерывно вращался, но для его обработки требуется АЦП, а это уже увеличение бюджета аппаратуры. Да и к тому же не все микроконтроллеры имеют встроенный АЦП.
Для подключения энкодер имеет три выхода. Центральный вывод общий, а два крайних при вращении периодически замыкаются со средним выводом, формируя импульсы.

Принцип работы инкрементного энкодера заключается в том, что при вращении ручки на двух выходах формируетюся импульсы. По количеству импульсов можно определить угол поворота вала, а по фазовому сдвигу между двумя сигналами определяют направление вращения. Если первым пришел импульс на правом контакте, то вал вращаетя в право. Если импульс пришел первым на левом выводе, то вал соответственно вращается на лево. Как правило энкодер дает 24 импульса на один полный оборот.
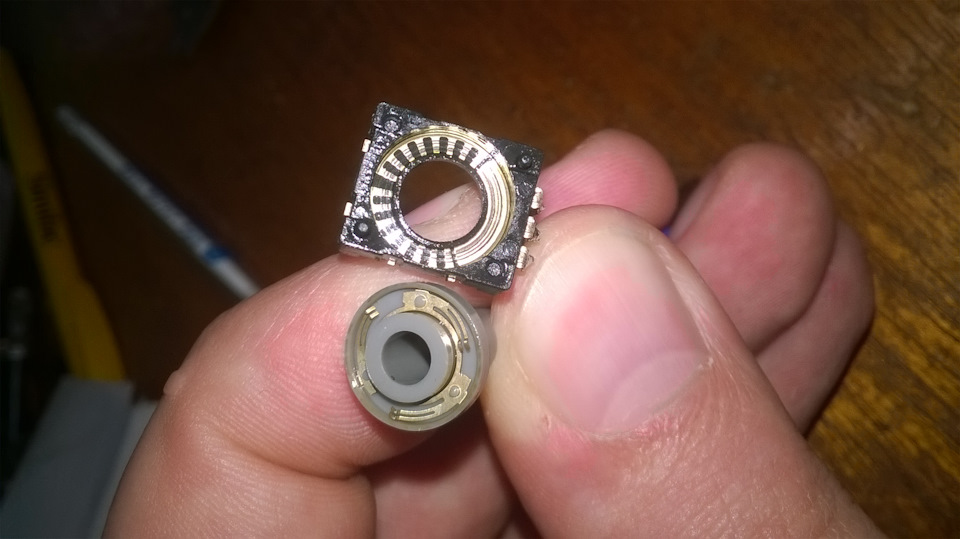
Ко мне в руки попали энкодеры двух разных конструкций, но результат их работы при этом одинаковый.
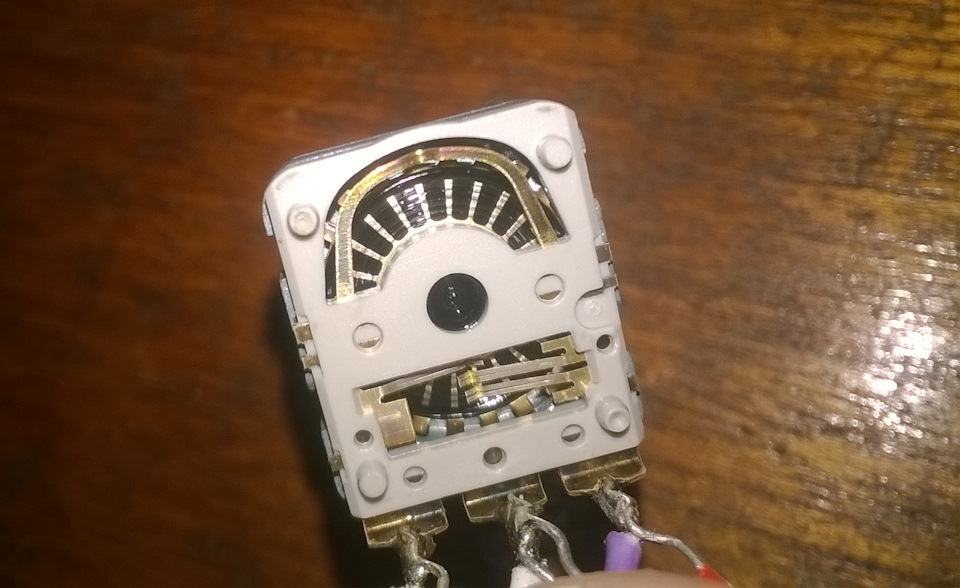
В основе механического инкрементного энкодера может использоваться вращающийся диск, на поверхности которого радиально размещены 24 контактные полоски. Эти контакты при вращении попеременно замыкаются с двумя подпружиненными контактами.
Более простая конструкция содержит три вращающихся пружинных контакта и один неподвижный диск. На поверхности диска нанесена изоляционная маска, которая при вращении вала периодически прерывает электрический контакт между выводами энкодера.

Как правило для обработки сигналов энкодера используют один вход внешнего прерывания микроконтроллера и один дискретный вход. Логика обработки сигналов очень простая. Когда вал вращается, происходит замыкание первого контакта, которое генерирует прерывание микроконтроллера. В обработчике прерывания производится проверка второго контакта. Если второй контакт замкнут, значит импульс на нем пришел раньше, и вал вращается допустим в лево. Если же второй контакт разомкнут, то значит импульс на нем придет позже, и вал вращается в противоположную сторону, т.е. в право.
В качестве испытуемого взял первую попавшую тестовую плату на микроконтроллере ATmega8. Кроме контроллера на плате меня интересовал разъем для программирования, контакты для подключения энкодера и интерфейс для подключения к COM порту компьютера. Для обеспечения стабильности связи микроконтроллера с ПК на плате предусмотрен кварцевый резонатор на 4МГц.

Схема подключения энкодера очень простая:
Средний вывод подключаем на землю;
Правый выход подключаем к 4 вывод МК;
Левый вывод подключаем к 5 выводу МК;.
Обычно правый и левый контакт подтягивают резисторами к плюсу питания, но я этого делать не стал, т.к. порты МК уже имеют встроенные подтягивающие резисторы 100кОм к выводу Vcc.
Далее в CodeVisionAVR на скорую руку написал простенькую тестовую программу. В результате ее работы микроконтроллер выдает в терминал компьютера содержимое счетчика и состояние правого и левого контактов энкодера. По состоянию контактов очень хорошо становится понятно, как работает энкодер.
Счетчик увеличивается при вращении энкодера вправо и уменьшается при вращении влево.
Вот и сам текст программы (смело вставляем его в проект для CodeVisionAVR, там все будет красиво и аккуратно выглядеть, а здесь оформление текста программы сильно хромает):
SREG.7=1; //разрешаем общее прерывание
printf(«AVRmegaboard is ON!\n\r»); //контрольное сообщение для ПК
Прошиваю его в микроконтроллер и… нифига не работает, что не удивительно! Если внимательно посмотреть на контактные дорожки энкодера, то хорошо видна выработка трущихся поверхностей. В следствии чего наблюдается эффект дребезка контактов при их переключении. А быстродействия МК достаточно чтобы дребезг многократно обработать как реальное срабатывание энкодера.
Для борьбы с дребезгом решил не заморачиваться и не писать программную защиту от дребезга контактов, а поступил старым дедовским способом — между выходами энкодера припаял два конденсатора по 10нФ, выдранные из той же шарманки, что и энкодеры. В результате все заработало как надо! Подключаем МК в COM порт и наблюдаем положенные 24 импульса на один оборот вала энкодера.
Есть еще несколько интересных алгоритмов обработки сигналов энкодера, если будет интересно, то чуть погодя могу про это написать.
P.S. В процессе испытаний ни одного радиоэлемента не пострадало! Энкодеры благополучно собраны обратно и продолжают выполнять свои функции.